
ALTERNATOR REGULATION : What are the different communication protocols on the market ?
 Franck, INTITEK-TMA Electronic Engineer, explains the main differences between the modern solutions for alternator regulation :
Franck, INTITEK-TMA Electronic Engineer, explains the main differences between the modern solutions for alternator regulation :
An alternator is an electrical system which provides power to the different embedded systems of the vehicle and also charge the battery. In order to assume this role, the voltage of the alternator must be constantly higher than the battery voltage, that is the simplistic summary of the regulation principle.
In the earlier technologies of alternators, the regulation was done by an integrated (or external) regulator which was linked directly to the battery voltage. Nowadays, the regulation is driven by the onboard computer (CPU) which gather information from all over the vehicle and optimize the commands.
In the present automotive industry, there is an important variety of communication protocol technologies. These protocols send “messages” to the alternator to drive the regulation voltage.
It is possible to group them into 3 families:
+ “Simple” protocols
+ “Advanced” protocols
+ “Smart” protocols
1 - “Simple” protocols
 This family only has « C-Term » protocol from Toyota and Honda.
This family only has « C-Term » protocol from Toyota and Honda.
The alternator regulates at aroung 14V. When « C » terminal is grounded, the regulation voltage drops to 12,8V.
This functionality is used when the engine of the vehicle needs more power. By lowering the regulation voltage, mechanical load is reduced and engine is released.
This protocol is « simple » since we can only choose between two regulation voltages: 12,8V or 14V.
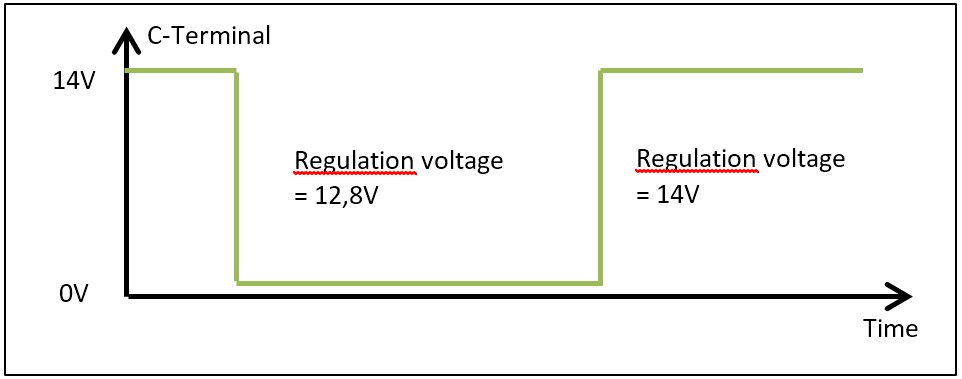 Signal Waveform
Signal Waveform
2 - “Advanced” protocols
This family contains the majority of the protocols found on modern alternators.
Among them we can list :
+ PCM on European Ford and Land Rover vehicles
+ RVC on GM vehicles
+ RLO on Toyota vehicles
+ P&D on Mazda, Kia or Mitsubishi vehicles
 In that case, we talk about “advanced” protocols because regulation voltage is totally controlled and set by the CPU.
In that case, we talk about “advanced” protocols because regulation voltage is totally controlled and set by the CPU.
These protocols use a PWM type encoding (Pulse Width Modulation). The pulse width of the signal sent by the on board computer to the alternator determines the regulation voltage provided.
Example:
PCM says that for 55% pulse width, regulation voltage is 14,2V.
Pulse width is called duty cycle. It corresponds to the percentage of duration of the signal’s high state regarding the period (see following image)
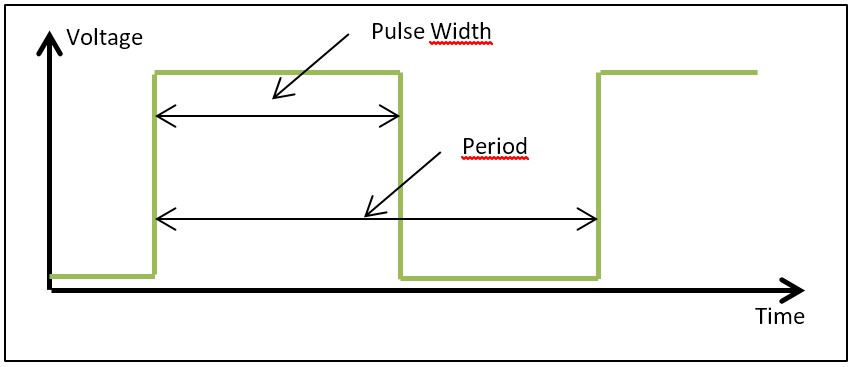 Signal waveform (pulse width = 55%)
Signal waveform (pulse width = 55%)
The protocols of this family differ by:
+ Their signal frequency
+ Their signal voltage amplitude
+ Their transformation ratio
3 - “Smart” protocols
 The last family, the most complex and also the most advanced protocol, is composed of LIN and BSS protocols with their derivatives: Lin1, Lin2, Lin3, BSS1, BSS2…
The last family, the most complex and also the most advanced protocol, is composed of LIN and BSS protocols with their derivatives: Lin1, Lin2, Lin3, BSS1, BSS2…
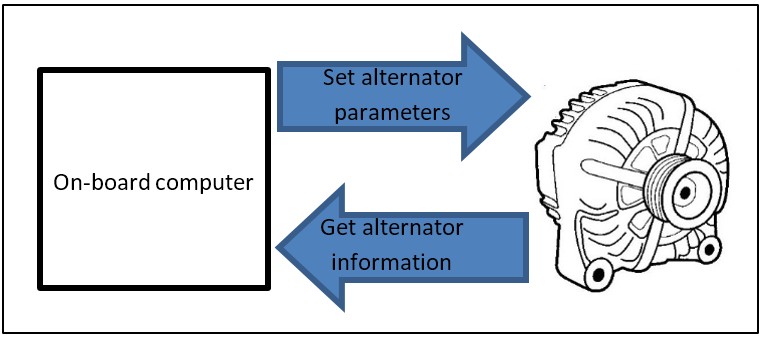
These protocols are said to be “smart” because they control and set more than the regulation voltage. For example, the Lin allows setting response time, default modes…
The communication between the CPU and the alternator is a two-ways flow. the alternator is able to answer CPU's question, and these responses are messages containing different information like breakdowns, temperatures, voltage regulation…
Protocols of this family differ by :
+ Their communication speed
+ Their encoding method
+ Their signal voltage amplitude
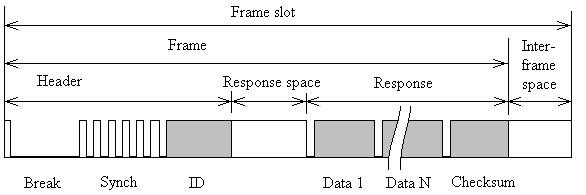
Lin frame example
For more details on LIN protocols, have a look to this article : LIN FOR DUMMIES
CONCLUSION :
The complexity and diversity of the different communication technologies for alternators regulation make the tests very complicated without modern tools. If the protocol for regulation is not the correct one, the alternator won't regulate properly, and sometime won't load at all (especially with LIN protocols).
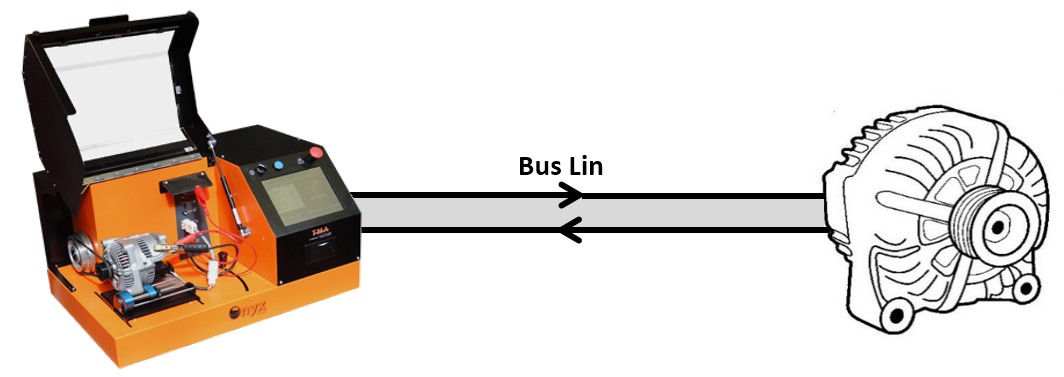
TMA has designed a range of testing machines, ONYX and TITANE, which are able to recognized automatically which protocole the regulator is using (between simple, advanced and smart protocols). These automated testers can simulate the communication between the CPU and the alternator, and proceed to a complete analysis. The protocol recognition step consists in checking one by one the different communication protocols existing on the market, until the alternator regulates properly.
 There are 2 main LIN families:
There are 2 main LIN families: